Following deadlines to apply for the poster session:
Submission deadline for papers:
August 3rd August 10th 2018
Notification of acceptance:
September 3rd September 10th 2018
Camera-ready deadline:
September 13th 2018
Workshop day:
October 1st, 9:00-13:30
1st Workshop on Proximity Perception in Robotics at IROS 2018
(in Room 2.R3 "La Paz" at the Madrid Municipal Conference Centre)
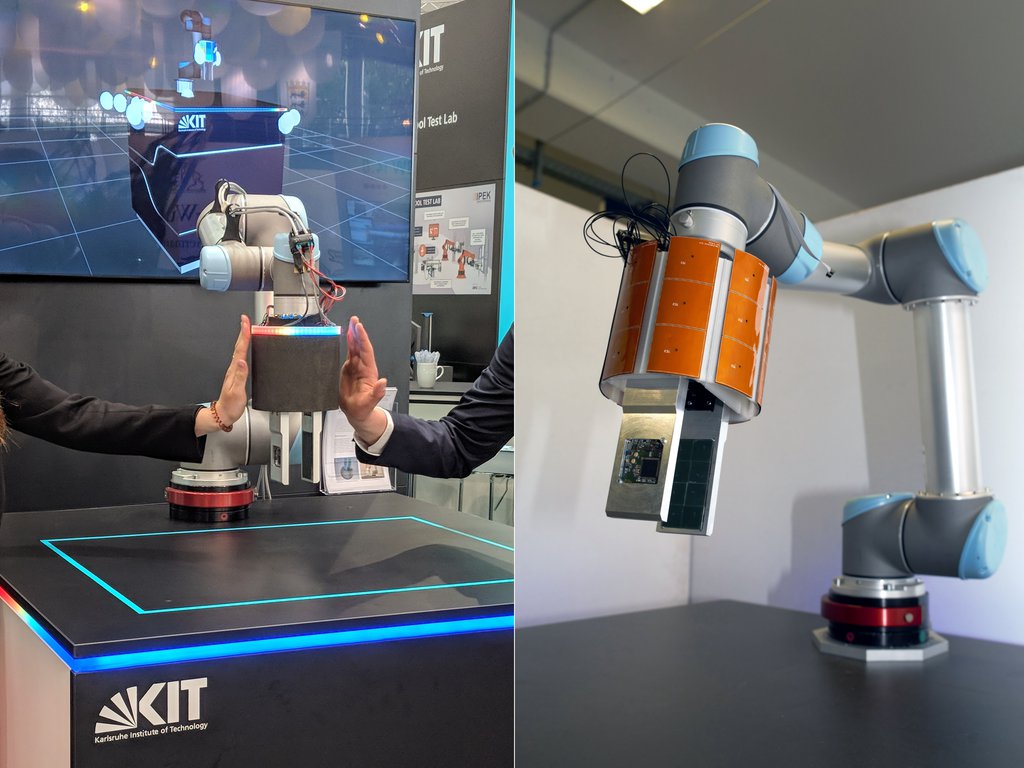
HRI-Workbench towards Collaboration and Safe Interaction
(Karlsruhe Institute of Technology)
Capacitive Sensing-based Material Recognition
(Karlsruhe Institute of Technology)
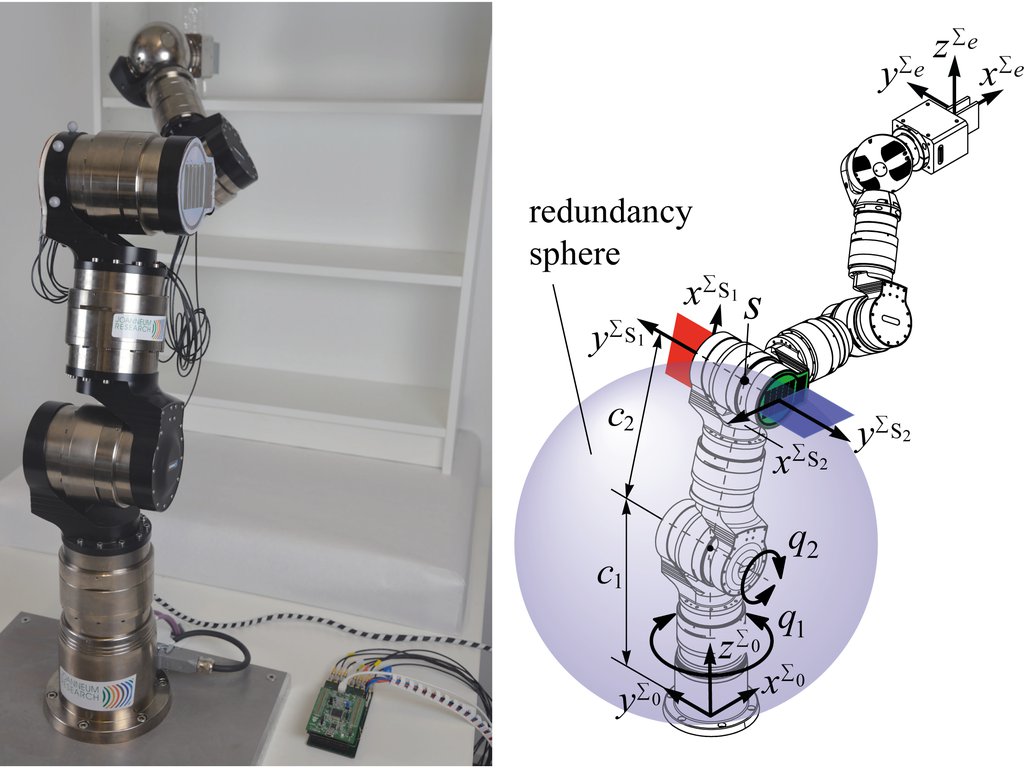
Contactless Control of a Kinematically Redundant Serial Manipulator using Tomographic Sensors
(JOANNEUM RESEARCH)
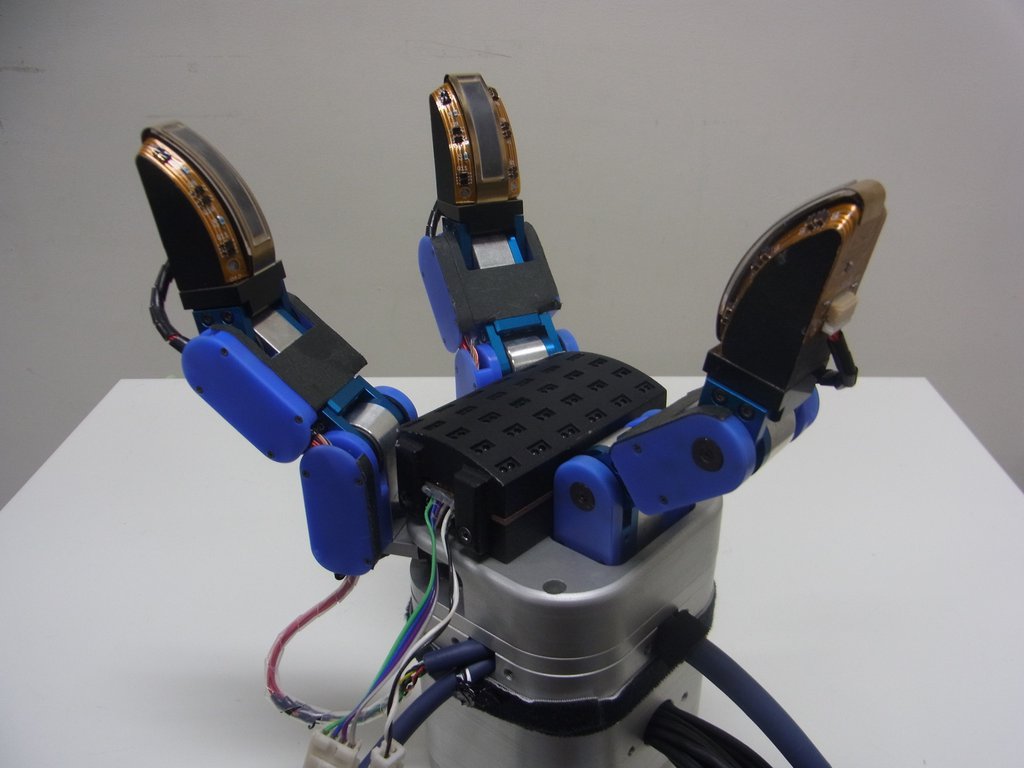
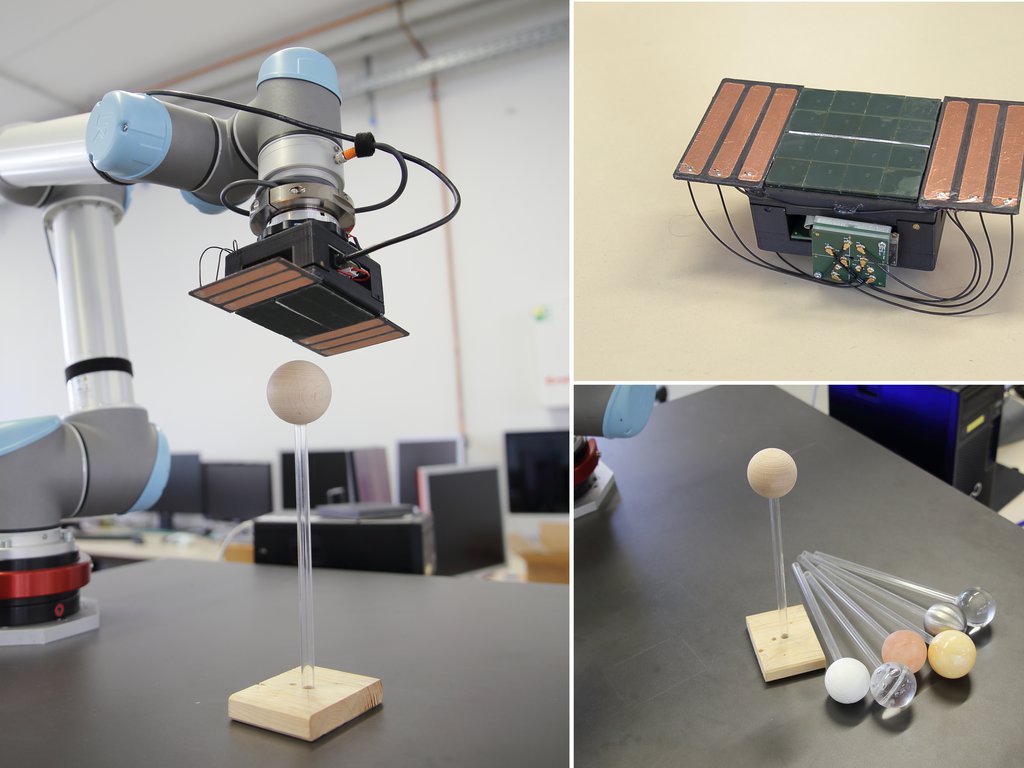
Multi-Fingered Hand with Optical Proximity Sensors
(The University of Tokyo)
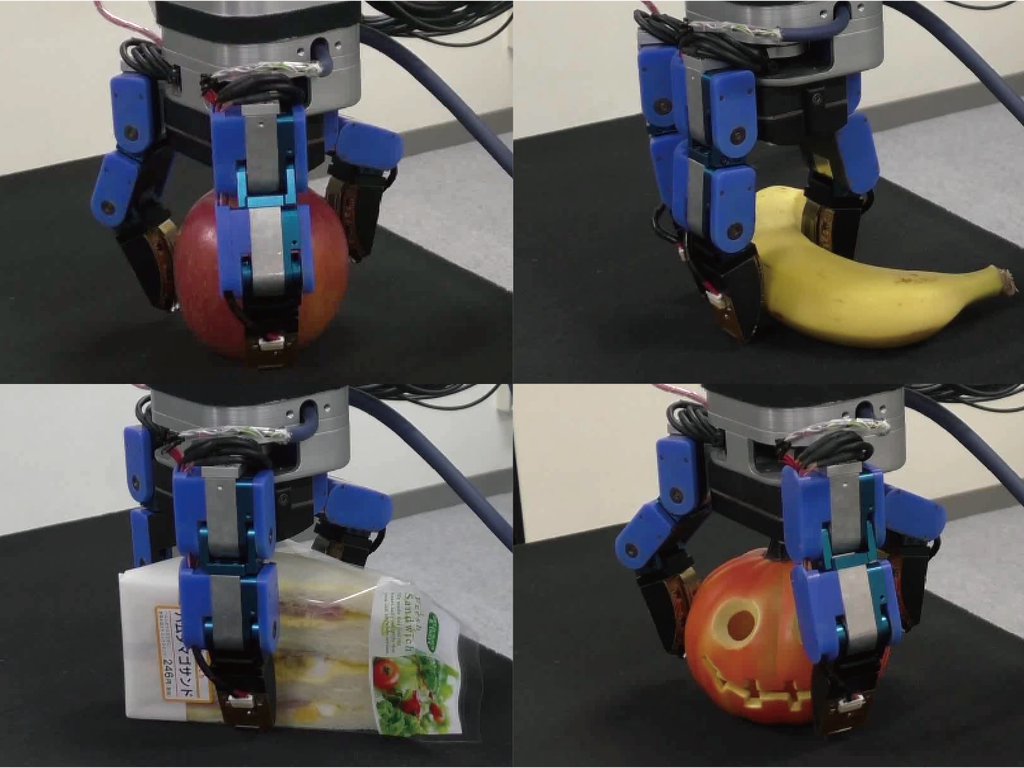
Preshaping Control for Various Moving Objects
(The University of Tokyo)
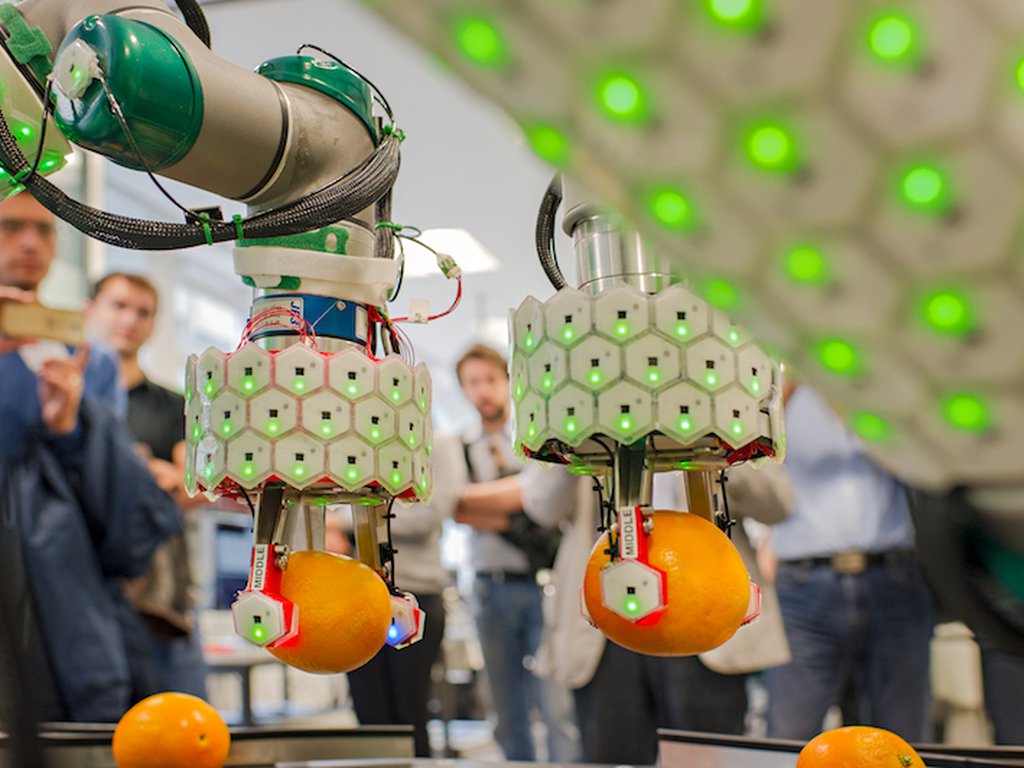
Modular Skin
(Technical University of Munich)

Modular Skin
(Technical University of Munich)

Tactile Fingertip Sensor
(Bielefeld University)

Grasp Force Adaption based on Incipient Slip Detection
(Bielefeld University)
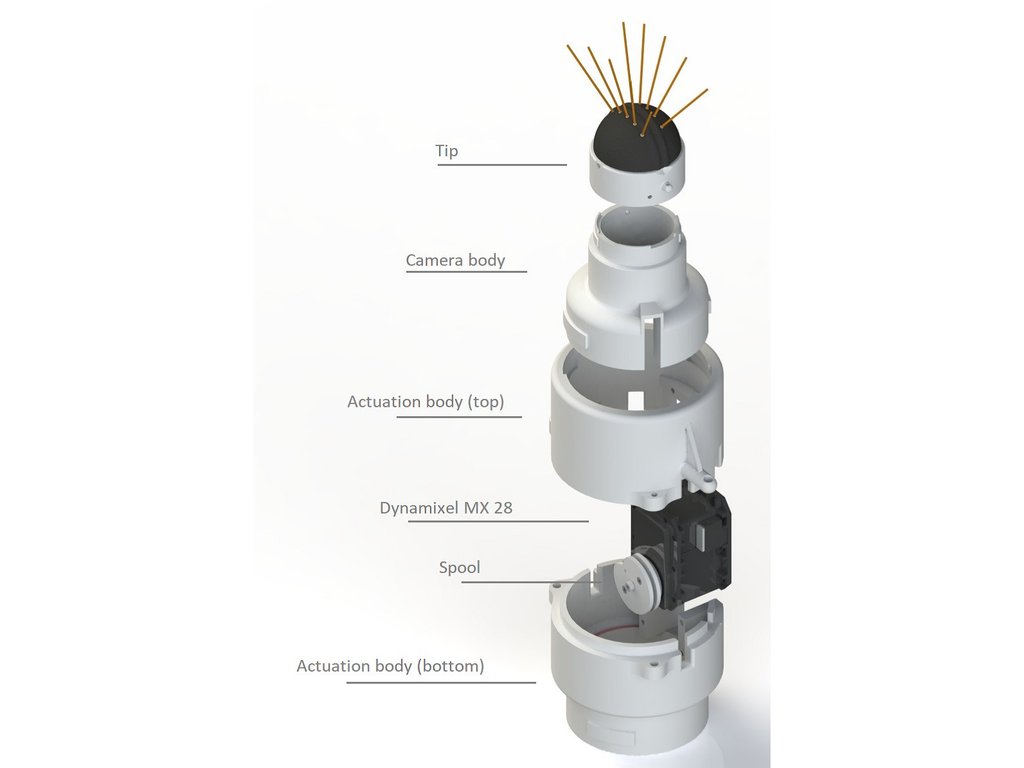
Tactile Whiskers
(University of Bristol)

Tactile Whiskers
(University of Bristol)
This workshop aims to offer a point of convergence for the different streams pertaining to Proximity Perception, which are currently active in the robotics community. We expect that Proximity Perception technologies will play an essential role for service and industrial robotics as well as for human-robot collaboration and compliant robotics applications in the near future. A similar trend could already be observed for Tactile Perception. On the one hand, designs of robotic graspers that include Proximity Sensors allow for novel control strategies for exploration, grasping and manipulation. On the other hand, the sensors will allow safety features to fulfill leading technical specifications such as ISO/TS 15066 for the operation of collaborative robots and improve the autonomy and perception of robotic systems in all fields.
Even though many researchers have addressed various aspects of Proximity Perception, no vivid community has established until now and visibility of the field has not yet reached an appropriate level. One of the main goals of this workshop therefore is to introduce the researchers and the results of their work to the broad robotics community and to researcher/engineers from the robotics industry. We want to show what benefits Proximity Perception can offer to robotics, especially to those unfamiliar with it. Another important aspect is the networking within the community as well as bridging the gap to the industry. Oftentimes the backgrounds of the researchers will be quite diverse, because of many different sensing principles suitable for implementing Proximity Perception (optical, acoustic, capacitive, radar, inductive, etc.). For these reasons we want to bring together researcher from both academia and industry. Furthermore, we aim to offer hands-on experience including live demos with sensors and systems currently used by different research groups. This will be interesting for participants that are new to the field but also for participants who already use Proximity Perception as capabilities and limitations of the various concepts will be discussed. Finally, as Proximity Perception is closely related to Tactile Perception we will also feature contents from this domain, with a focus on how Proximity Perception can profit from established approaches in Tactile Perception.
Support
We are grateful for the support of the following organizations:
- IEEE RAS Technical Committee Robotic Hands, Grasping and Manipulation (Homepage)
- IEEE RAS Technical Committee on Human-Robot Interaction & Coordination (Homepage)
- IEEE RAS Technical Committee on Haptics (Homepage)
- IEEE RAS Austria Section (Homepage)
![]()

Objectives
With this workshop we want to bring the topic of Proximity Perception and its community into a spotlight. This objectives of the workshops are:
- To help establish networks and a vivid community in Proximity Perception. As of now, the community of researchers in Proximity Perception is very distributed and only loosely coordinated.
- To open the topic to the wider robotics community, because we expect that Proximity Perception technologies will play an essential role for service and industrial robotics as well as for safe human-robot collaboration and compliant robotics applications in the near future.
- To provide a platform for young researchers to gain experience by presenting their results.
- To provide a platform for the exchange between researchers and stakeholders from industry.
- To allow researchers from the related field of Tactile Perception to contribute with their experience and insights towards what are promising approaches for Proximity Perception.
Topics of Interest
- Proximity Sensors
- Sensor Desgin
- Measurement Principles (infra-red, capacitive, radar, inductive, etc.)
- Sensor Calibration
- Multi-Modal Sensors (tactile, shear, vibration, etc.)
- Robotic Skins
- Application Domains for Proximity Sensors
- Human-Robot Interaction
- Human-Robot Collaboration
- Preshaping and Grasping
- Multi-Modal Exploration
- Assistive Robots
- Prosthetics
- Collision Avoidance
- Teleoperation with Proximity Sensing
- Intuitive Robot Programming, Human-Robot Interface
- Multi-Modal Control
- Sensor Fusion
- Bridging from Tactile Perception to Proximity Perception
Mailing-List: see here.
Preliminary Workshop Schedule
Monday, October 1st, 2018, 9:00-13:30
|
|
Talk |
Who |
|
9:00-9:05 |
Introduction |
Organizers (Inria, JOANNEUM RESEARCH) |
|
9:05-9:30 |
Invited Talk 1 |
Joshua R. Smith (University of Washington) |
|
9:30-9:55 |
Industry Talk |
Matthias Brandl (Infineon Technologies AG) |
|
9:55-10:15 |
Organizer Talk 1 |
Hubert Zangl (Alpen-Adria-Universität) |
|
10:15-11:00 |
||
|
|
Coffee break |
|
|
11:30-11:55 |
Invited Talk 2 |
Gordon Cheng (Technical University of Munich) |
|
11:55-12:15 |
Invited Talk 3 |
Nathan Lepora (University of Bristol) |
|
12:15-12:40 |
Invited Talk 4 |
Keisuke Koyama (The University of Tokyo) |
|
12:40-13:00 |
Invited Talk 5 |
Robert Haschke (Bielefeld University) |
|
13:00-13:20 |
Organizer Talk 2 |
Björn Hein (Karlsruhe Institute of Technology) |
|
13:20-13:30 |
Closing |
Organizers (Inria, JOANNEUM RESEARCH) |
|
|
Lunch |
Speaker







|
Speaker |
Joshua R. Smith |
|
Invited Talk |
A unified Sensor for Pre-Touch, Touch and Post-Touch Force Measurement |
|
Abstract |
In my talk, I will describe recent efforts to create a single sensor that provides pre-touch proximity sensing, can detect the onset of contact, and provides measurements of force after contact. Moreover I will describe the sensor concept, its implementation and evaluation and example applications. This work is in collaboration with Sidd Srinivasa and Patrick Lancaster. |
|
Speaker |
Matthias Brandl |
|
Industry Talk |
Ultra Short Range Radar for Human Machine Interaction (HMI) |
|
Abstract |
Radar technology evolved from big bulky devices to detect airplanes to small devices that are used in car and even mobile devices. These devices allow a four-dimensional detection of its surroundings by measuring the distance to a target, the horizontal angle (azimuth ϕ), the vertical angle (elevation ϑ) and the velocity of the target. The high bandwidth of today’s radar systems in combination with the frequency-modulation continuous wave (FMCW) scheme results in a length resolution in the centimeter or even millimeter range. This high distance resolution and the three other target informations (ϕ, ϑ, v) are required for radar algorithms like gesture sensing, occupation sensing, or material detection. In robotic applications, radar sensors are an ideal enhancement to other sensors.
|
|
Speaker |
Hubert Zangl |
|
Organizer Talk |
Near Field Tomography in Proximity Perception |
|
Abstract |
Near Field Tomography like Electrical capacitance tomography (ECT) and Magnetic Induction Tomography (MIT) are methods to non-invasively determine the material distribution within a region of interest to provide cross-sectional images of this distribution, which also allows for detection and classification of objects. While the simplicity and robustness of the sensor elements make them very attractive for proximity perception in robotics, the reconstruction problem is ill-posed in particular due to the constraints on the sensor placement. A stable solution of such problems can only be found by utilization of prior knowledge, which typically involves the use of computationally intensive algorithms that do not meet the timing constraints in robotics. Consequently, light weight approaches have been developed. In the talk results of our work on fast reconstruction methods in Near Field Tomography and applications of the approach in object detection and human machine interaction are discussed. |
|
Speaker |
Gordon Cheng |
|
Invited Talk |
Making the Best of Pretouch |
|
Abstract |
In this talk, I will highlight some of the activities we are performing on tactile interaction, we will show how we have made the best use of multi-modal sensors. Making use of various modalities, such as proximity to better control and enhance the perceptual capability of the robot working in a dynamic environment. Several examples will be given. |
|
Speaker |
Nathan Lepora |
|
Invited Talk |
Biomimetic Tactile Sensing and Haptics |
|
Abstract |
This talk discusses a novel vibrissal tactile sensor - the TacWhisker array - based on modifying a 3D-printed optical cutaneous (fingertip) tactile sensor – the TacTip. Two versions are considered: a static TacWhisker array analogous to immotile tactile vibrissae (e.g. rodent microvibrissae) and a dynamic TacWhisker array analogous to motile tactile vibrissae (e.g. rodent macrovibrissae). Performance is assessed on an active object localization task. Overall, the TacWhisker arrays give a new class of tactile whiskered robots that benefit from being relatively inexpensive and customizable. Furthermore, the biomimetic basis for the TacWhiskers fits well with building an embodied model of the rodent sensory system for investigating animal perception. |
|
Speaker |
Keysuke Koyama |
|
Invited Talk |
Reactive Control for High-Speed Grasping Using Optical Proximity Sensors |
|
Abstract |
In my talk, I will present about an integrated control of a multiple-degrees-of-freedom hand and arm with a high-speed proximity sensing. The high-speed proximity sensing enables real-time control of grasp configurations such as an arm tip vector, wrist orientation and the initial finger positions before grasping. Since the positions and postures are controlled without contact, there is no danger of damaging the object or the robot. In order to realize the control, we designed a high-speed proximity sensor for the fingertips of the hand, developed an integrated control system for the hand and the arm, and proposed a reactive architecture based on high-speed proximity sensing. |
|
Speaker |
Robert Haschke |
|
Organizer Talk |
Tactile Servoing Algorithms for Manipulation and Object Exploration |
|
Abstract |
While we at CITEC, Bielefeld University are aiming to understand and replicate human grasping and manipulation and thus explicitly consider environmental contacts, our approaches to tactile servoing can also be useful for proximity sensing. In my talk, I will shortly introduce some tactile sensors we developed, I will introduce tactile servoing as a simple, but effective approach to tactile-based grasping and manipulation. Combining visual and tactile feedback into a coherent servoing controller, we can explore, grasp and manipulate unknown objects. Using incipient slip detection, a grasp can be stabilized in an online fashion, much like humans do as well. |
|
Speaker |
Björn Hein |
|
Organizer Talk |
Sensor Technology and Algorithms for Flexible Proximity and Tactile Perception |
|
Abstract |
The presentation will introduce the multi-modal sensors currently developed at KIT-IPR. These sensors provide the ability to sense proximity and tactile events. The same measuring principle is used for both modalities. In combination with the modular architecture a very flexible sensors system can be realized. A brief overview will be given regarding prototype applications that were already investigated showing the potential of these kind of sensors and how ML techniques can be beneficially used to extract information out of the given sensor signals. |
Call for Papers
Click here to download the Call for Papers as PDF.
In this workshop we will have a joint poster and demo session. The prospective participant can aim at presenting novel results with a poster. The submission is in form of a short paper with length of 2 pages (maximum 3 pages). Novel ideas/experimental results are required for acceptance of the paper. Click here to download the LaTex-Template (IEEE template with marking for the workshop).
All submissions will be reviewed using a single-blind review process. Submissions must be sent in PDF to:
indicating [IROS 2018 Workshop] in the e-mail subject.
Accepted Papers will be published at the open access repository KITopen under the Creative Commons license (CC BY-NC-ND).
Submission Deadline: August 3rd
Notification of acceptance: September 3rd
Camera-ready deadline: September 13th
Workshop day: October 1st, 9:00-13:30
Poster Session:
"A New Capacitive Proximity Sensor for Detecting Ground-Isolated Objects"
Authors: Yitao Ding and Ulrike Thomas
"Versatile Distance Measurement Between Robot and Human Key Points using RGB-D Sensors for safe HRI"
Authors: Petr Švarný, Zdenek Straka and Matej Hoffmann
The proceedings can be found here.
Demo Session:
In order to provide the participants of the workshop with hands-on experience on the hardware currently being developed an used, the workshop offers a demo session. Technologies from research and from industry will be shown.
Demos Scientific Participants
|
Scientific-Participant |
Demonstration |
Related Links |
|---|---|---|
|
Keisuke Koyama, University of Tokyo |
Optical proximity sensor for control of grasping form before contact |
|
|
Hosam Alagi, Stefan Escaida Navarro and Björn Hein, Karlsruhe Institute of Technology |
Modular Capacitive Tactile Proximity Sensor with flexible Spatial Resolution |
Datasheet (Info) |
|
Stephan Mühlbacher-Karrer, JOANNEUM RESEARCH Robotics, Hubert Zangl, Alpen-Adria-Universität Klagenfurt |
Capacitive Tomography Sensors for Contactless Control of a Serial Manipulator |
https://www.youtube.com/watch?v=_1i0UdlR1SQ https://www.youtube.com/watch?v=w0GI6w2tPcA&t=118s
|
Demos Industrial Participants
|
Industrial Participant |
Demonstration |
|
|
Blue Danube Robotics |
Airskin |
airskin (homepage) |
|
Fraunhofer Institute for Algorithms and Scientific Computing SCAI |
Obstacle Tracking and Avoidance using Radar Perception for Industrial Robots |
|
| Infineon Technologies AG | Gesture Sensing | |
|
MRK-Systeme |
Safety-related capacitive proximity sensor system |
http://www.mrk-systeme.de/ |


