IMPORTANT DATES
August 24th, 2020
Paper Submission
September 4th, 2020
Paper Submission
September 24th, 2020
Acceptance Notification
October 8th, 2020
Submission of Final
Paper & Poster
October 25th - November 25th 2020
Workshop @ IROS On-Demand
SPONSORED BY:

Welcome to the 4th Workshop on Proximity Perception in Robotics at IROS 2021:
Increasing Safety for Human-Robot Interaction using Tactile and Proximity Perception
Starting 27th of September, IROS 2021

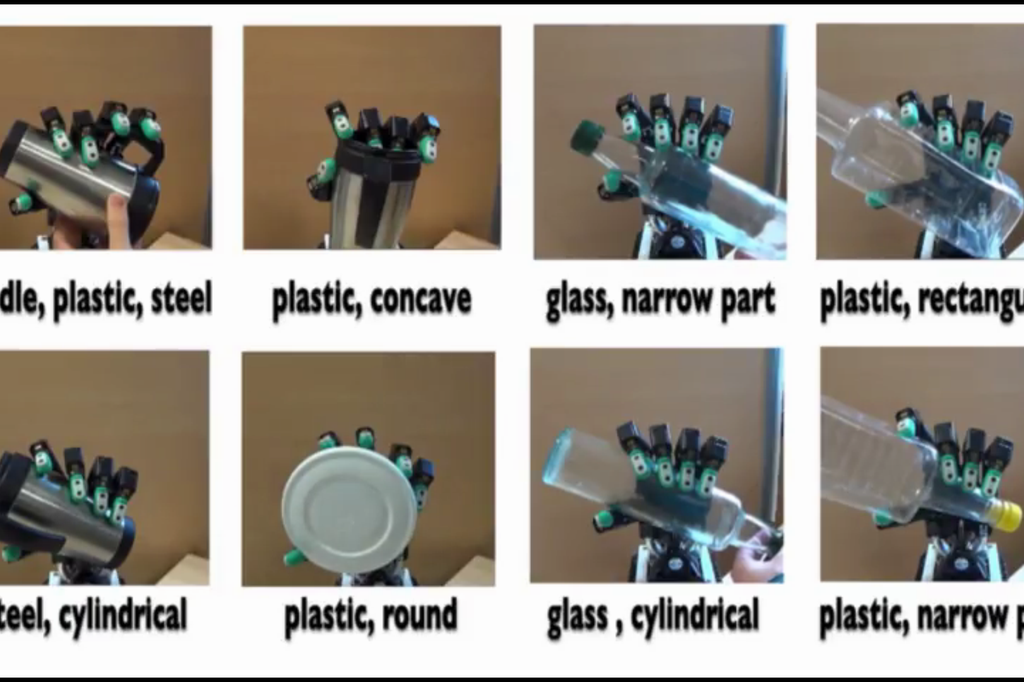
Multi-Modal Prosthetic Hand
Karlsruhe Institute of Technology (KIT)
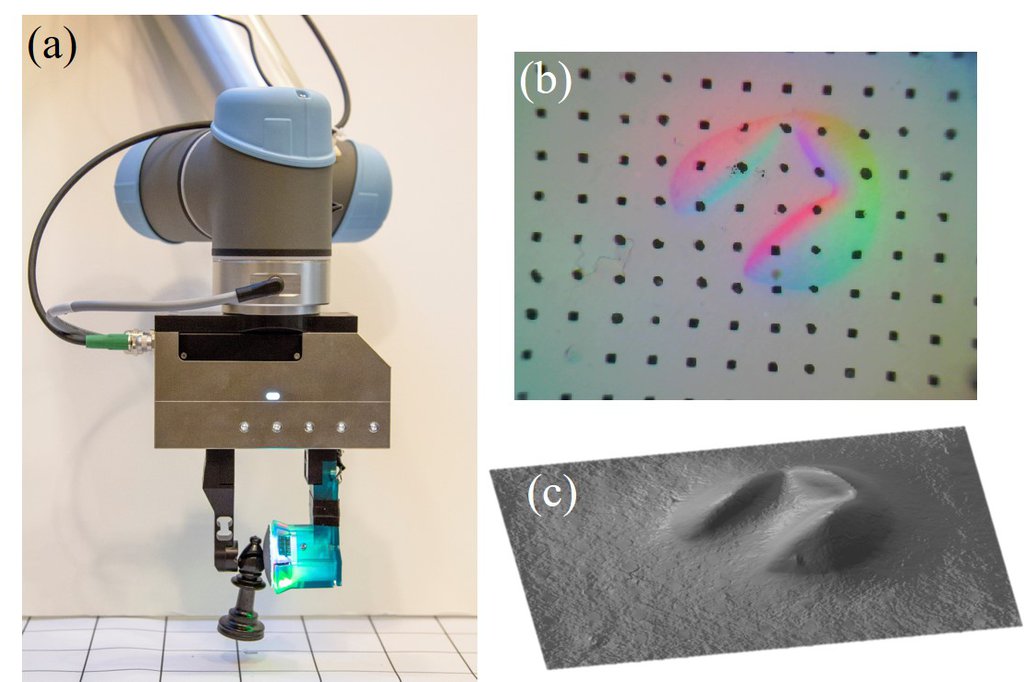
GelSight Sensor
Carnegie Mellon University (CMU)
One-Shot Haptic Object Recognition
Laboratoire d'Informatique, de Robotique et de Microélectronique de Montpellier (LIRMM)
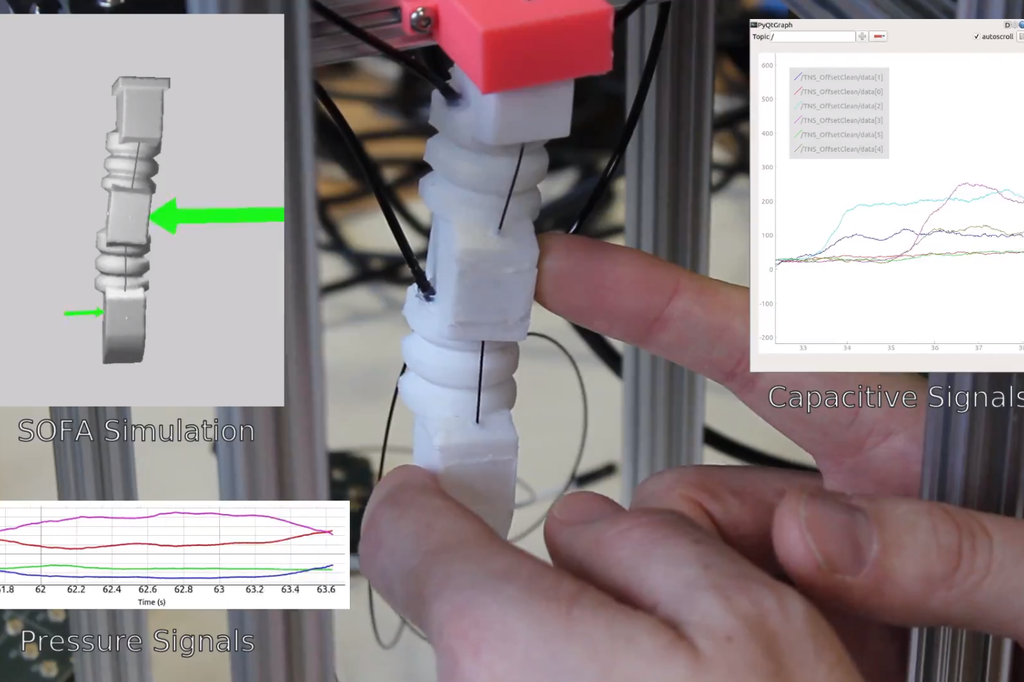
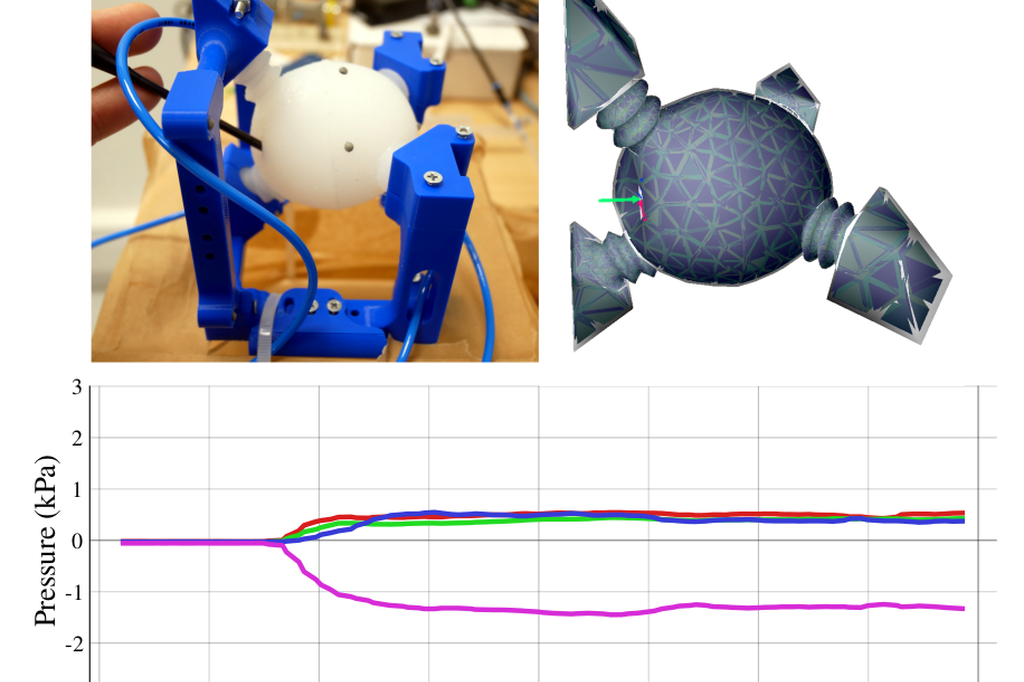
Model-Based Sensor Fusion for Soft Robotics
Inria
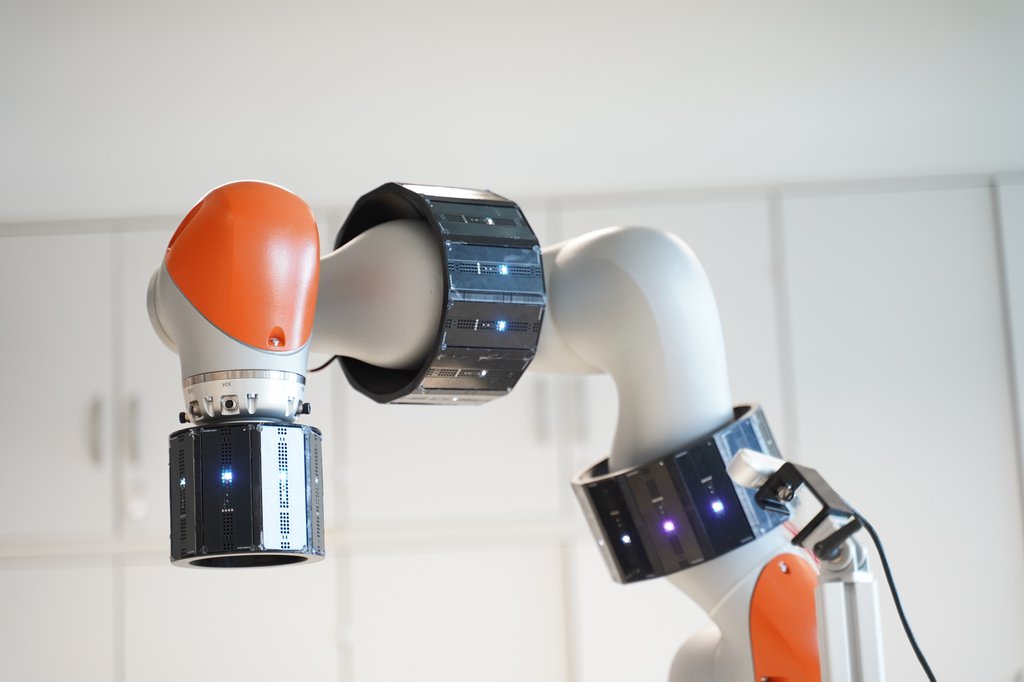
Proximity Sensing Cuffs
Chemnitz University of Technology

Collaborative human-robot work cell
JOANNEUM RESEARCH ROBOTICS (JR ROBOTICS)

3D Ultrasound Sensor
University of Antwerp

Multi-Modal Perception for HRC Gripper
Karlsruhe Institute of Technology (KIT)
Touch-Sensitive Prostate Phantom with Model-based Sensing
(Inria and University of Lille)
In the 4th workshop we want to focus on the open questions on safety-related applications involving proximity and tactile systems and sim-to-real learning, respectively. We have therefore put together a program of speakers with expertise in these areas. Our speakers from industry are able to provide first-hand accounts of the procedures for certifying and deploying proximity and tactile perception technologies on real robotic systems. They will also provide valuable insights about the challenges found in this domain in general. Our speakers from research provide expertise in cutting edge proximity and tactile perception technology and their applications. This includes approaches for sensor simulation and HRI using these sensors. As a result, the workshop continues to bridge between research and industry as well as between the communities of proximity and tactile perception. Once again, we will feature an extensive demo -session that will anchor these concepts to concrete hardware already available today.
As in the previous editions, we will feature a Panel Discussion for an organized exchange between the workshop participants and an extensive Demo Session that will relate these ideas to concrete hardware already available today. In addition, we provide a platform for PhD students to present their work in the field to a broader audience.
If you like to receive further anouncements to proximity perception in general, subscribe to our mailing list:
The goals of the workshop can be summarized as follows:
- Continue to foster the community of roboticists and hardware developers working in this domain
- Feature technologies with various measurement principles such as optical, acoustic, capacitive, radar etc.
- Show current technologies in the Demo Session
- Provide insights in current research and industry on safety applications
- Discuss the benefits in safety with proximity and tactile perception.
- Elaborate the requirements for certification and deployment of such systems.
- Let experts in multi-modal perception and HRI give an account of their experience, to help motivate novel approaches for proximity perception in robotics.
- Identify requirements on the technology of proximity sensors for such approaches.
- Continue to bridge to industry via invited industrial talks and demos
- Let leading industry experts provide insights on how current technologies can be part of products and commercial solutions in the future.
- Offer a point of contact between industrial partners and researchers
- Offer PhD-students a forum for their work through short talks, posters and demos
- Promote scientific collaborations between the participants of the workshop
Support
We are grateful for the support of the following organizations:
- IEEE RAS Technical Committee Robotic Hands, Grasping and Manipulation (Homepage)
- IEEE RAS Technical Committee Human-Robot Interaction and Coordination (Homepage)
- IEEE RAS Technical Committee on Haptics (Homepage)
Invited Speakers

Prof. Hubert Zangl
University of Klagenfurt, Austria
Real Time Simulation of Proximity Perception Sensors towards Sensors System Design and Sim2Real Applications

Prof. Shinichi Hirai
Ritsumeikan University, Japan
Fabric-based Proximity/Contact Sensors with Application to Variable Stiffness Links
Prof. Gordon Cheng
Technical University of Munich, Germany
Rich robot interactions with large area e-skin
Prof. Lorenzo Jamone
Queen Mary University of London, UK
Tactile Sensing for Robotic Manipulation based on Soft Materials and Magnetism

Dr. Katherine J. Kuchenbecker
Max Planck Institute for Intelligent Systems, Germany
Broad Sensing of Tactile Events Supports Social-Physical HRI

Prof. Choi Hyouk Ryeol
Sungkyunkwan University, South Korea
Flexible Dual-mode Tactile and Proximity sensor for safe human robot physical interaction (pHRI)

Prof. Danica Kragic
Royal Insitute of Technology, Sweden
Perceptual learning for interaction

Prof. Rebecca Kramer-Bottiglio
Yale University, US
Integrated sensing in soft robots with adaptive morphology.

Dr. Kirill Safronov
KUKA Deutschland GmbH, Germany
Application of Machine Learning-based Technologies for Bin-Picking Automation

Thomas Pilz
Pilz GmbH, Germany
Safety is the key for proximity

Dr. Peter Heiligensetzer
MRK-Systeme GmbH, Germany
Safe human-robot collaboration in the industrial sector by using capacitive proximity sensors
Prof. Zackory Erickson
Carnegie Mellon University, US
Capacitive Servoing for Physically Assistive Robotics
Invited Speakers
| Speaker | Prof. Hubert Zangl |
|
Invited Talk |
Real Time Simulation of Proximity Perception Sensors towards Sensors System Design and Sim2Real |
| Abstract | |
| Speaker | Prof. Shinichi Hirai |
|
Invited Talk |
Fabric-based Proximity/Contact Sensors with Application to Variable Stiffness Links |
| Abstract | |
| Speaker | Prof. Gordon Cheng |
|
Invited Talk |
Rich robot interactions with large area e-skin |
| Abstract | |
| Speaker | Prof. Lorenzo Jamone |
|
Invited Talk |
Tactile Sensing for Robotic Manipulation based on Soft Materials and Magnetism |
| Abstract | |
| Speaker | Dr. Katherine Kuchenbecker |
|
Invited Talk |
Broad Sensing of Tactile Events Supports Social-Physical HRI |
| Abstract | |
| Speaker | Prof. Choi Hyouk Ryeol |
|
Invited Talk |
Flexible Dual-mode Tactile and Proximity sensor for safe human robot physical interaction (pHRI) |
| Abstract | |
| Speaker | Prof. Danica Kragic |
|
Invited Talk |
Perceptual learning for interaction |
| Abstract | |
| Speaker | Prof. Rebecca Kramer-Botigglio |
|
Invited Talk |
Integrated sensing in soft robots with adaptive morphology |
| Abstract | |
| Speaker | Dr. Kirill Safronov |
|
Invited Talk |
Application of Machine Learning-based Technologies for Bin-Picking Automation |
| Abstract | |
| Speaker | Thomas Pilz |
|
Invited Talk |
Safety is the key for proximity |
| Abstract | |
| Speaker | Dr. Peter Heiligensetzer |
|
Invited Talk |
Safe human-robot collaboration in the industrial sector by using capacitive proximity sensors |
| Abstract | |
| Speaker | Prof. Zackory Erickson |
|
Invited Talk |
Capacitive Servoing for Physically Assistive Robotics |
| Abstract |
On-Demand Material and Live Session
This year's IROS will feature a 2h live session of the workshop during the regular conference program. Apart from the live session, pre-recorded talks of our invited speakers will be available as on-demand material. If you are interested, feel free to participate as audience during the pre-recordings. The link to participate will be anounced here on this page once the dates are determined.
Follow us on Twitter to receive latest updates: [Click here]
Live Session:
The live session will take place on September, 27th 2 pm - 4 pm CEST (Central European Summer Time) and will feature:
- A panel discussion with the invited speakers
- Paper presentations and demos
Pre-Recordings:
|
Session A - 20th August, 9:30 am - 11 am (CEST) Link: Zoom |
||
|
Speaker |
Title | Time |
|
Dr. Kirill Safronov (KUKA) |
Application of Machine Learning-based Technologies for Bin-Picking Automation |
9:30-10:00 |
|
Thomas Pilz (Pilz GmbH) |
Safety is the Key for Proximity |
10:00-10:30 |
|
Session B - 26th August 10 am - 12 pm (CEST) Link: Zoom |
||
|
Speaker |
Title | Time |
| Prof. Danica Kragic | Perceptual learning for interaction | 10:00-10:30 |
|
Dr. Katherine J. Kuchenbecker |
Broad Sensing of Tactile Events Supports Social-Physical HRI | 10:30-11:00 |
|
Prof. Choi Hyouk Ryeol |
Flexible Dual-mode Tactile and Proximity Sensor for Safe Human Robot Physical Interaction (pHRI) | 11:00-11:30 |
|
Session C - 26th August 1:30 pm - 2:30 pm (CEST) Link: Zoom |
||
|
Speaker |
Title | Time |
| Prof. Hubert Zangl | Real Time Simulation of Proximity Perception Sensors towards Sensors System Design and Sim2Real Applications | 13:30-14:00 |
| Prof. Shinichi Hirai | Fabric-based Proximity/Contact Sensors with Application to Variable Stiffness Links | 14:00-14:30 |
|
Session PhD Forum - 26th August 3:00 pm - 4:30 pm (CEST) Link: Zoom |
||
|
Speaker |
Title | Time |
| Serkan Ergun | Towards Safe Physical Human-Robot Interaction with Capacitive Sensors for Tactile and Proximity Perception | 15:00-15:20 |
| Rachael Burns | Teaching Safe Social Touch Interactions Using a Robot Koala | 15:20-15:40 |
| Abu Bakar Dawood | Multi-Modal Skins for Soft Robot | 15:40-16:00 |
| Caleb Escobedo and Matthew Strong | Contact Anticipation for Physical Human-Robot Interaction with Robotic Manipulators using Onboard Proximity Sensors | 16:00-16:20 |
|
Session D - 26th August 4:50 pm - 5:50 pm (CEST) Link: Zoom |
||
|
Speaker |
Title | Time |
| Prof. Zackory Erickson | Capacitive Servoing for Physically Assistive Robotics | 16:50-17:20 |
| Prof. Lorenzo Jamone | Tactile Sensing for Robotic Manipulation based on Soft Materials and Magnetism | 17:20-17:50 |
|
Extra Session - 8th September 2 pm am - 3:20 pm (CEST) Link: Zoom |
||
|
Speaker |
Title | Time |
| Peter Heiligensetzer (MRK-Systeme GmbH) | Safe Human-Robot Collaboration in the Industrial Sector by using Capacitive Proximity Sensors | 14:00-14:30 |
| Francesca Palermo (PhD Forum) | Multi-modal detection of cracks and exploration via graph theory for developing an optimal exploration algorithm for a robotic manipulator | 14:30-14:50 |
| Prof. Rebecca Kramer-Botigglio | Integrated sensing in soft robots with adaptive morphology | 14:50-15:20 |
On-Demand Material:
- Grouped talks of invited speakers
- PhD Forum
Watch the pre-recorded talks of the workshop.
Youtube Playlist: [Click Here]
Session A:
Session B:
Session C:
Session D:
Session E:
Session PhD Forum:
Call for Papers
to download the official Call for Paper as PDF file.
Note: New submission deadline is August 20th, 2021.
Paper Submission
Submission of a paper with a minimum length of 2 pages and maximum 3 pages. Novel ideas/experimental results are required for acceptance of the paper.
PhD Forum Proposal
If you want to participate in the PhD forum, please provide an 1 page abstract of your talk as proposal.
Submission
[Click here] to download the LaTex-Template (IEEE template with marking for the workshop).
All submissions will be reviewed using a single-blind review process. Please provide your submission as PDF to:
iros2021-workshop [at] joanneum.at
Accepted contributions will be published at the open access repository KITopen under the Creative Commons license (CC BY-NC-ND).
Topics of Interest
- Proximity Sensors
- Multi-Modal Sensors (tactile, shear, vision, etc.)
- Robotic Skins (architectures)
- Bridging from Tactile to Proximity Perception
- Bio-Inspired Robotics
- Multi-Modal Sensors for Soft Robotics
- Applications:
- Human-Robot Interaction
- Human-Robot Collaboration
- Collision Avoidance
- Multi-Modal Control
- Teleoperation with Proximity Sensing
- Prosthetics
- Assistive Robots
- Preshaping ans Grasping
- Haptic Exploration
- Intuititve Robot Programming
- Human-Robot Interface





Lisa-Marie Faller
Carinthia University of Applied Sciences, Villach, Austria